What Autonomous Vehicle Fleets Require From DC Fast Charging, Beyond kW?
When people talk about EV charging, the conversation often starts and ends with kilowatts. How much power can a charger deliver? How fast can a vehicle recharge?
For autonomous vehicle fleets, that framing is incomplete.
Robotaxi operations are built around utilization, uptime, and predictability. Charging infrastructure is not just an energy source – it is an operational system that directly affects fleet availability, customer experience, and unit economics.
As autonomous fleets scale, DC fast charging requirements extend well beyond raw power output.
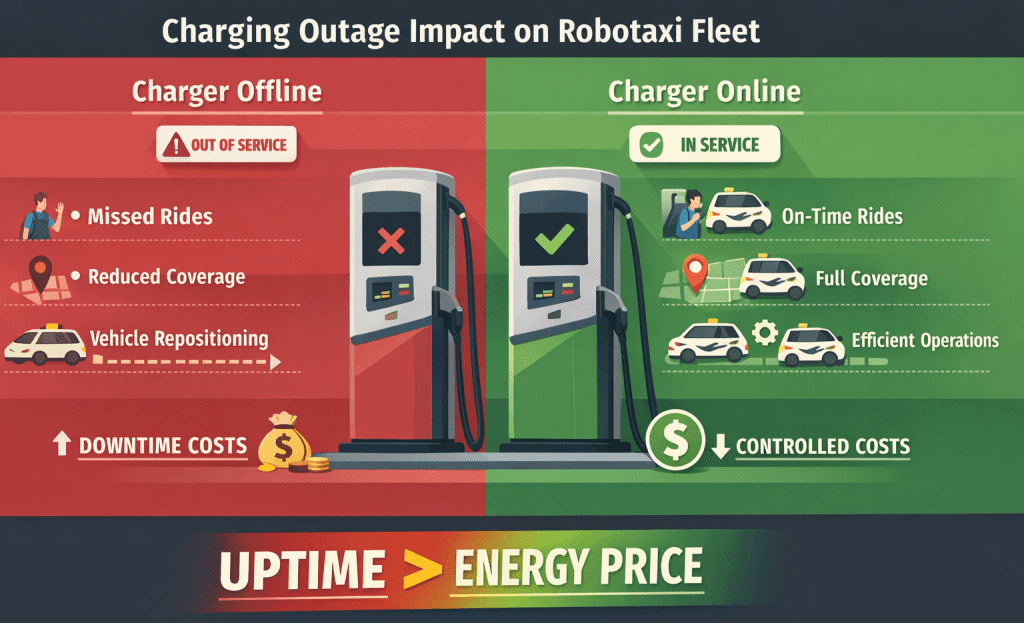
For robotaxi fleets, as well as for conventional ride-share fleets, like Tower Mobility, a charger outage is not an inconvenience. It is an immediate lost service.
Autonomous operations are sensitive to even small disruptions. A single offline charger can cascade into missed rides, reduced coverage, and increased vehicle repositioning. Over time, the cost of downtime often exceeds differences in energy pricing.
This is why AV operators evaluate charging infrastructure through an uptime lens. Redundancy, monitoring, and response times frequently matter more than nominal cost per kilowatt-hour.
Autonomous fleets rarely assume perfect conditions. Charging infrastructure is expected to fail gracefully, not catastrophically.
This means designing for:
Redundancy is not about excess – it is about maintaining operational continuity in environments where vehicles are expected to run continuously.
Robotaxi fleets operate through centralized control systems. Charging infrastructure is expected to integrate into that ecosystem.
Real-time telemetry allows operators to:
Without visibility, charging becomes a blind spot in an otherwise data-driven operation. As fleets scale, infrastructure that cannot be monitored and managed remotely becomes increasingly difficult to justify.
Autonomous fleets operate under heightened public and regulatory scrutiny. Charging infrastructure must meet strict safety and permitting standards across jurisdictions.
This includes:
Charging sites are not isolated assets. They are part of a broader system that must satisfy regulators, city partners, and internal safety teams simultaneously.
Autonomous fleet expansion often hinges on timelines. Charging infrastructure that takes years to deploy can delay city launches or limit fleet size at critical moments.
As a result, deployment speed has become a key evaluation criterion for AV charging. Infrastructure that can be activated quickly – while still meeting safety and reliability requirements – allows fleets to move in step with operational plans rather than waiting on external dependencies.
In practice, many charging solutions deployed as interim measures remain in service far longer than initially expected. Grid upgrades are delayed. Fleet demand evolves. Expansion plans change.
Autonomous fleets are forced to consider infrastructure that can adapt to these uncertainties – solutions that are flexible, scalable, and not tightly bound to a single long-term assumption.
What begins as temporary often becomes strategic.
For autonomous fleets, charging infrastructure is not a static asset. It is a living part of the operational system.
DC fast charging that supports robotaxi scale must deliver more than power. It must provide uptime, resilience, visibility, safety, and speed – consistently, and under real-world conditions.
As robotaxi programs mature, the difference between chargers that simply work and infrastructure that truly supports autonomy is becoming increasingly clear.
L-Charge designs and operates DC fast charging infrastructure specifically for commercial fleets and autonomous fleets, with a focus on uptime, modularity, and rapid deployment. Through its Charging-as-a-Service and Power-as-a-Service models, L-Charge supports fleets that need reliable charging without waiting for long utility timelines.
As autonomous vehicle operations scale, infrastructure approaches built around flexibility and operational discipline are becoming essential components of fleet strategy.
Charging uptime directly affects vehicle availability. When a charger goes offline, robotaxis cannot serve rides, leading to immediate service loss, reduced coverage, and operational inefficiencies across the fleet.
A single charger outage can trigger cascading effects, including missed rides, vehicle repositioning, and uneven service distribution. Because robotaxi fleets operate at high utilization, even small disruptions can significantly affect performance.
Charging downtime can result from equipment failures, grid interruptions, maintenance delays, or insufficient redundancy. Without real-time monitoring and rapid response, minor issues can escalate into prolonged service disruptions.
Autonomous fleets reduce outage risk by prioritizing redundancy, continuous monitoring, and fast response times in their charging infrastructure. Designing systems to fail gracefully helps maintain uptime even when individual components experience issues.